January 7, 2008
| 1.1 | Outline: Concepts & Topics | ||
| Artificial Intelligence - The Field, the Idea | |||
| Agents | |||
Perception, Action, Goals |
|||
| Architecture & the Perception-Action Loop | |||
| Methodologies | |||
| Subsumption Architecture | |||
| Predicate Calculus | |||
| Why study complete cognitive systems? | |||
| 1.2 | Artificial Intelligence - The Field, the Idea | |
| Artificial Intelligence / Gervigreind | "Artificial" as in "artificial
flower", i.e. man-made Gervigreind, eins og gerviefnin |
|
| Basic idea | An engineering approach to the phenomenon of intelligence | |
| Early Founding Fathers | Rene Descartes, Charles Babbage, Alan Turing | |
| Dartmouth Conference 1956 | Considered official founding of the field, by John McCarthy, Marvin Minsky and others. | |
| Scientific Foundation | Computer Science - Intelligence can be formulated as an information transmission and transformation task | |
| Truly Interdisciplinary | Intersects Lingustics, Psychology, Neuro- and Brain Science, Philosophy (epistemology, philosophy of mind) | |
| Related field | Cognitive Science: The computational study of natural intelligence | |
| 1.3 | Agents | |
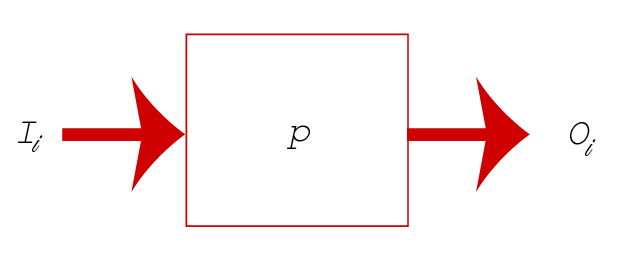
| Abstract definition | Agent is a process with a behavior that transforms information from one format to another - Perceptual data is transformed into action through cognition | |
| Interactions | An agent interacts with its environment through its sensors and actuators | |
| Autonomy | An agent can act more or less autonomously. At one end of spectrum: completely non-autonomous; at the other end: totally autonomous. Both extremes define in fact "non-intelligence". | |
| Prototypcal agent | A physical robot - an "embodied mind" | |
| Embodiment | Used about intelligences that have control over some physical aspect of the world. The state of being tied to a psysical (or virtual) body, that, while giving access to a world, limits one's actions in space and time. | |
| Robot | The word "robot" comes from the Czech word "robota", which means "worker". Term coined by the late Czech writer Karel Capek in his famous play R.U.R. (Rossum's Universal Robots), 1921. "A robot is a mechanical device that can perform physical tasks." [wikipedia] |
|
| Virtual robot | A robot that "lives and works" in a virtual world. | |
| Humanoid robot | A (physical or virtual) robot in the form of a human. The Icelandic word is "vélmenni". | |
| 1.4 |
Characteristics of Agents | |
| Omnipotence | Can do anything | |
| Omniscience | Knows everything | |
| Agent | Neither omniscient nor omnipotent | |
| The prototypical agent is an animal | - with a definite embodiment, which means that they are localized in "the world" (where "world" can have different meanings) | |
| They only see a small part of the world | Have a limited view of the world Their input (e.g. "perception") is limited |
|
| Their abilities to act are limited and specialized | Have a limited repertoire of actions the can inflict on the
world Their output (e.g. decision to act or action) is limited |
|
| Limited minds, in one or more ways | They have limited processing and memory capacity | |
| Other limitations may affect their functioning | ||
| The simplest ("dumb") agents |
|
|
| The smartest agents form "social networks" |
|
|
| 1.5 | Perception-Action Main Issues | |
| Perception |
If you want to act in the world you need to sense the things that matter. Hence, perception. |
|
| Perceiving the world | Sensor types and perceptual data processing is organized along the following main lines (natural intelligence):
|
|
| Acting in and on the world | For every situation there are a large number of courses of action possible (assuming your sensors present rich enough information for you to base your choices on). Generating, organizing and choosing courses of action is called planning. Insects do very little planning; humans do a lot. | |
| Perception-Action Integration | It is not enough to perceive; it is not enough to act; the two have to be tied together in a way that makes sense to the beings' state of being. | |
| 1.6 | Perception | |
| Vision | Computer vision has come a long way in the last
25 years. Lack of computing power still a hindrance. |
|
| Hearing | Hearing has mostly been about speech recognition. This field is ripe with interesting problems to be tackled. One of my favorites: The Laughter Detector. | |
| 1.7 | Action |
|
| Definition | "Action is anything you do that can be recorded by a video camera." | |
| Action is preceded by a plan | Plans are made to achieve goals | |
| Categorization of actions/plans | There are many proposals as to how to slice action, from plans to motor/muscle movements. Here is one of them. Levels:
|
|
| 1.8 | Goals | |
| Goal: Definition | The decision to change the world from state A
to state B. The steps needed to be taken for state A to change to state B is called a "plan". A goal is achieved if, after a perception has confirmed the present state to be A, and after an action is performed, the world is in state B. |
|
| Goals | The trouble with goals: Anything that is purposefully changed in the world can be said to have been a goal of the system that changed it | |
| Goals in AI | Typically the word "goal" is reserved for an end-state that is obviously much higher than the most primitive step needed to get there from the present state | |
| Explicit vs. implicit goals | Goals can be explicitly represented in the system (e.g. as
an IF-THEN). Implicit goals are goals which can be inferred by a system's observable behavior and may be an emergent property of the system's architecture or other features. |
|
| 1.9 | Architecture & the Perception-Action Loop | |
 |
||
The old pipeline model of
cognitive processing. |
||
 |
||
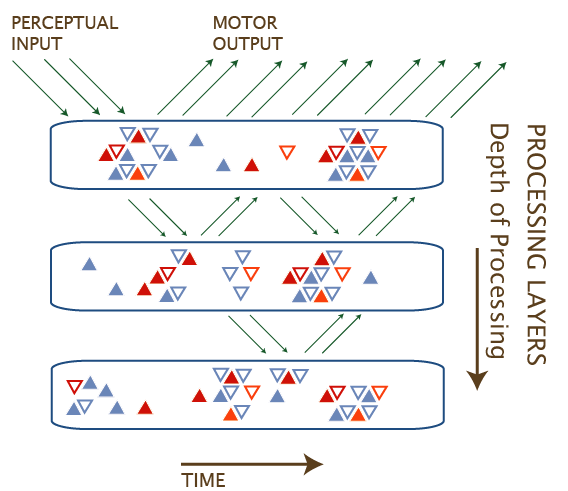
The new model of layered continuous
processing and execution. |
||
| Perception-Action Loop: A question of realtime | Realtime just means "real fast". Right? |
|
 |
||
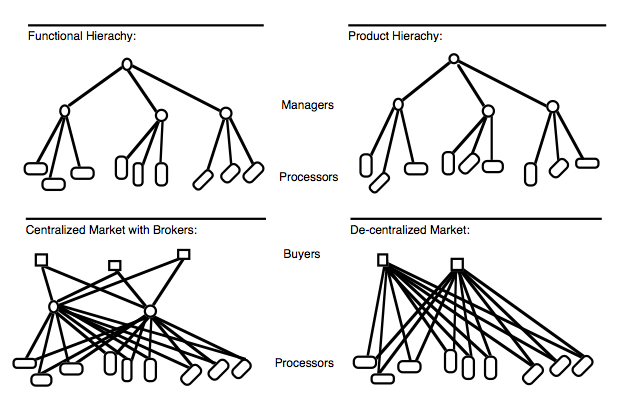
Coordination hierachies: The
human and animal minds are probably ... ? |
||
| 1.10 | Methodologies | ||
| Subsumption Architecture |  |
||
| What it is | Robot control architecture system developed at the MIT AI Lab by Rodney Brooks | ||
| Why it exists | An effort to shift attention from human-level intelligence to simpler organisms, and in the process create the simplest possible architecture that could express intelligent behavior. | ||
| How we will use it | You will study the subsumption architecture to a sufficient degree that you can implement it in Java or C++ to control the CADIA Hexapod in your final project. | ||
| Predicate Calculus | |||
| What it is | Logical formalism to represent objects, properites, relations, facts | ||
| Why it exists | Representating the world in ways that allow interaction with it | ||
| How we will use it | Knowledge representation | ||
1.11 |
Why study complete cognitive systems? | |
One of the problems we've had in AI is that in the early years — in the sixties and seventies — you could build programs that seemed pretty exciting. You could get a program to understand a sentence, or translate a sentence. Twenty years later, it's not exciting any more. You've got to build something real, and in order to build real things you have to work with real problems. .... What I've learned in twenty years of work on artificial intelligence is that artificial intelligence is very hard. This may sound like a strange thing to say, but there's a sense in which you have only so many years to live, and if we're going to build very intelligent machines it may take a lot longer to do than I personally have left in life. ... One thing that's clear to me about artificial intelligence and that, curiously, a lot of the world doesn't understand is that if you're interested in intelligent entities there are no shortcuts. Everyone in the AI business, and everyone who is a viewer of AI, thinks there are going to be shortcuts. I call it the magic-bullet theory: somebody will invent a magic bullet in the garage and put it into a computer, and Presto! the computer's going to be intelligent. Journalists believe this. There are workers in AI who believe it, too; they're constantly looking for the magic bullet. [Roger Schank, Information Is Surprises] Disembodied, isolated "intelligences" don't seem that intelligent — and frankly, compared to animals and humans, they aren't. Intelligence achieves its power from its ability to generalize. Even the most complex algorithm can never become general enough to solve all that needs to be solved to understand AI. |
||
| Why do simulations? | Virtual screwups are less expensive. Soldering takes too much time. | |
| Why do a project? | Humans learn by thinking and doing. The two cannot be separated. | |
| Roger Schank answers | Imagine that this is how I'm going to teach you about food
and wine. We're going to read about food and wine, and then I'll show you
films about food and wine, and then I'll let you solve problems about the
nature of food and wine, like how to decant a bottle of wine, what the optimal
color is for a Bordeaux, and so forth. And then I'll give you a test. Would you learn to appreciate food and wine this way? Would you learn anything about food and wine? The answer is no. Because what you have to do to learn about food and wine is eat and drink. Memorizing all the rules, or discussing the principles of cooking, isn't going to do any good if you don't eat and drink. In fact, it works the other way around. If you eat and drink a lot, I can get you interested in those subjects. Otherwise I can't. [Roger Schank, Information Is Surprises] |
|