March 15, 2007
| 9.1 | Outline of Topics | |
| Formal Languages & Their Ontological and Epistemological Commitments | ||
| Fuzzy Logic Overview | ||
| Fuzzy Set Theory | ||
| IF-THEN Rules / Fuzzy Inference | ||
| Fuzzy Controler Example | ||
| Example Computation | ||
| Fuzzy Logic: Pros and Cons | ||
| 9.2 | Formal Languages & Their Ontological and Epistemological Commitments (see pp. 166 & 463 in your textbook) | ||
| LANGUAGE | ONTOLOGICAL COMMITMENT (types of entities in the world) |
EPISTEMOLOGICAL COMMITMENT (types of beliefs about entities) |
|
| Propositional logic | facts | true/false/unknown | |
| First-order logic | facts, objects, relations | true/false/unknown | |
| Temporal logic | facts, objects, relations, times | true/false/unknown | |
| Probability theory | facts | degree of belief [0, 1] (probability) | |
| Fuzzy logic | degree of truth | degree of belief [0, 1] | |
| 9.3 | Fuzzy Logic Overview | |
| What it is | A method for classification and decision making
using a continuous scale of truthness/membership. An alternative to traditional notions of set membership. Superset of standard Boolean logic. |
|
| History |
|
|
| What it is composed of |
|
|
| Usage | Gained popularity in the late 1980s, esp. in Japan, as Japanese manufacturers started applying it to various kinds of control tasks in products such as cameras, washing machines and automobiles. | |
| 9.4 |
Fuzzy Set Theory | |
| What it is | A means of specifying how well an object satisfies a vague description, using a range from 0 to 1. | |
| Historically | Extensions of mathematical set theory as first studied by Cantor (1845-1918). | |
| Fuzzy membership | The proposition "the Sinclair Z80 is not a powerful computer " refers to an object (computer of type Z80) and classifies it into a set with other objects that can be considered/labeled "powerful". | |
| Notation | mPOWERFUL(Z80) = 0.1 | |
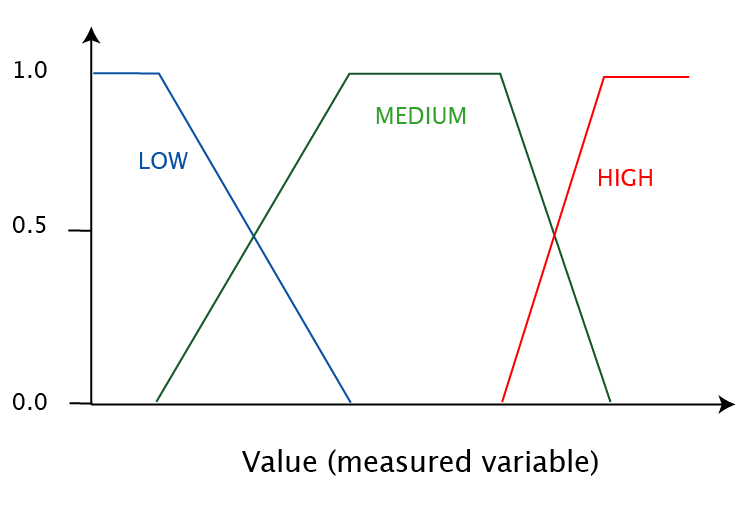
| Examples |
|
|
Membership functions can be drawn in various
ways. In the case of computer CPU speed, for example,
the low end of the x-axis would represent kHz and the high end GHz.
| 9.5 | IF-THEN Rules | |||||||||||||||||
| IF speed is HIGH & distance to next car is SMALL | THEN brake HARD | |||||||||||||||||
| IF speed is HIGH & distance to next car is MEDIUM | THEN apply MEDIUM force to brake | |||||||||||||||||
| IF speed is MEDIUM & distance to next car is MEDIUM | THEN apply MEDIUM force to brake | |||||||||||||||||
Table representing permutations of measured variables' states |
||||||||||||||||||
| 9.6 | Fuzzy Inference | |
| T(A ∧ B) | = MIN(T(A), T(B)) | |
| T(A ∨ B) | = MAX(T(A), T(B)) | |
| T(¬A) | = 1 - T(A) | |
| ...where T returns degree of truth (fuzzy membership) | ||
| Mnemonic | AND = MIN / OR = MAX | |
| 9.7 | Fuzzy Controler Example | |||||||||||||||||
| Control task | Given that we are driving and we want to maintain a safe distance between us and the cars in front, how can we determine brake force based on our own speed and the distance to the car in front? | |||||||||||||||||
| Create matrix / ruleset describing conditions and actions | ||||||||||||||||||
Represented in a Matrix |
||||||||||||||||||
Martix representing action to be taken in a fuzzy controller: Applied
brake force (0, 1, 2). |
||||||||||||||||||
Written As Rules |
||||||||||||||||||
1 |
IF Speed is {LOW | MEDIUM} & Distance is LARGE THEN brake force = 0 |
|||||||||||||||||
2 |
IF Speed is HIGH & Distance is LARGE THEN brake force = 1 |
|||||||||||||||||
3 |
IF Speed is LOW & Distance is MEDIUM THEN brake force = 0 |
|||||||||||||||||
4 |
IF Speed is MEDIUM & Distance is MEDIUM THEN brake force = 1 |
|||||||||||||||||
5 |
IF Speed is HIGH & Distance is MEDIUM THEN brake force = 2 |
|||||||||||||||||
6 |
IF Speed is LOW & Distance is SMALL THEN brake force = 1 |
|||||||||||||||||
7 |
IF Speed is {MEDIUM | HIGH} & Distance is SMALL THEN brake force = 2 |
|||||||||||||||||
| 9.8 | Example Computation | |
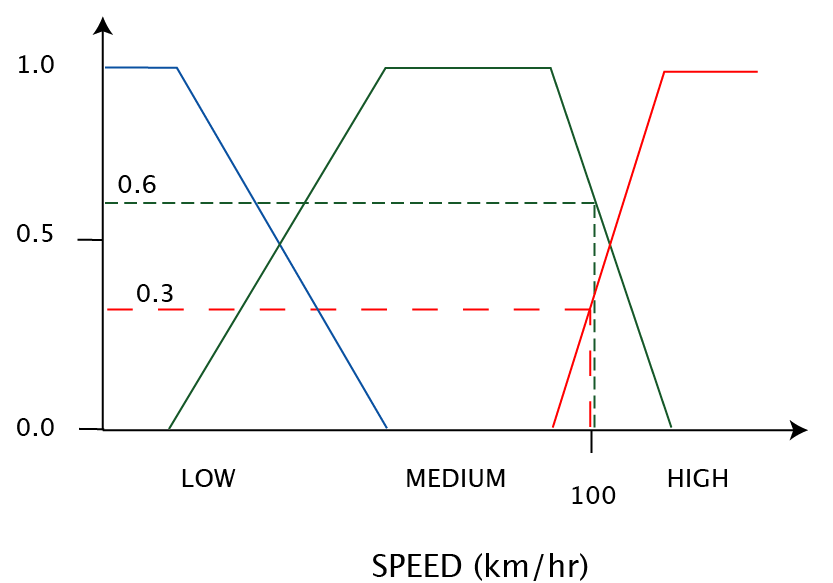
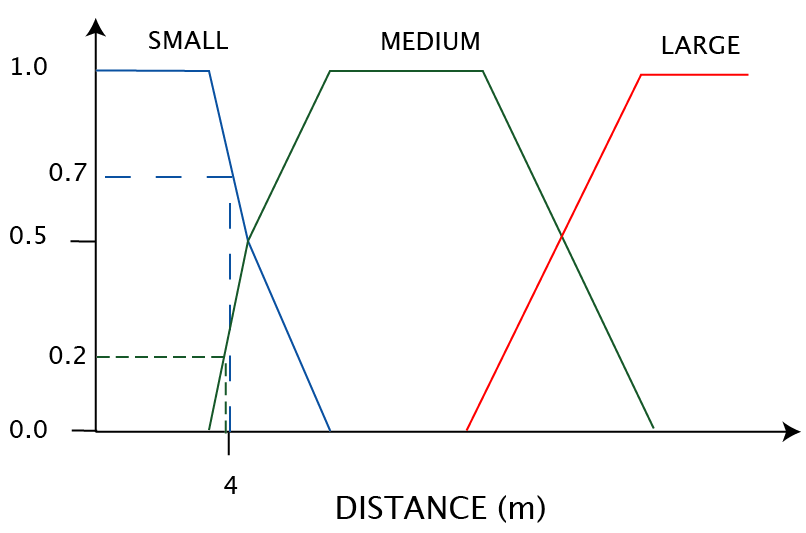
| Control task - specific case | Given that we are driving at 100 km/hr and there are 4 meters between us and the car in front, how hard should we hit the brakes? | |
| Given |
|
|
| Use rules to derive fuzzy membership and pick action |
|
|
| WRITTEN AS RULES | FUZZY MEMBERSHIP (see graphs below) | |
1 |
IF Speed is {LOW | MEDIUM} &
Distance is LARGE THEN brake force = 0 |
min( (max[0, 0] = 0) & min([0]) ) = 0 |
2 |
IF Speed is HIGH & Distance is LARGE THEN brake force = 1 |
min[0.6, 0] = 0 |
3 |
IF Speed is LOW & Distance is MEDIUM THEN brake force = 0 |
min[0, 0.2] = 0 |
4 |
IF Speed is MEDIUM & Distance is MEDIUM THEN brake force = 1 |
min[0.3, 0.2] = 0.2 |
5 |
IF Speed is HIGH & Distance is MEDIUM THEN brake force = 2 |
min[0.6, 0.2] = 0.2 |
6 |
IF Speed is LOW & Distance
is SMALL THEN brake force = 1 |
min[0, 0.7] = 0 |
7 |
IF Speed is {MEDIUM | HIGH} &
Distance is SMALL THEN brake force = 2 |
min( (max[0.3, 0.6] = 0.6 ) & (min[0.7]) ) = 0.6 |
| Pick the rule with the highest membership value | RULE 7: Brake force 2 | |
| 9.9 | Fuzzy Logic: Pros and Cons | |
| Pros | Simpler to use than most alternatives for solving complex control tasks (and often performs better). Very successful industrial applications:
|
|
| Cons | Need to be crafted by hand (although parameters can be subsequently tuned later by automatic learning techniques). May not scale well to large rulesets (i.e. same limitation as other kinds of rule-based knowledgebases). |
|