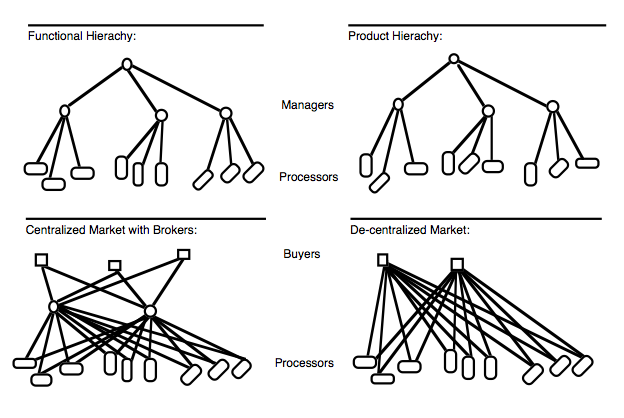
Coordination hierachies: A functional hierarchy organizes the execution
of tasks according to their functions. A product hierarchy organizes
production in little units, each focused on a particular product. Several
types of markets exist - here two idealized versions are show, without
and with brokers. De-centralized markets require more intelligence to
be present in the nodes, which can be aleviated by brokers. Brokers,
however, present weak points in the system: If you have a system with
only 2 brokers mediating between processors and consumers/buyers, failure
in these 2 points will render the system useless. Notice that in a basic
program written in C++ every single character is such a potential point
of failure, which is why bugs are so common in standard software.
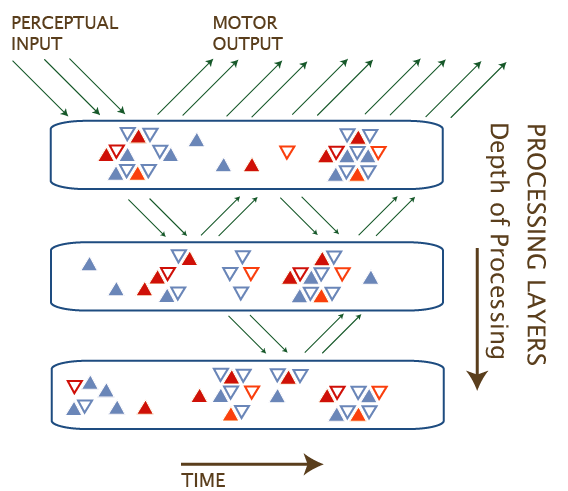
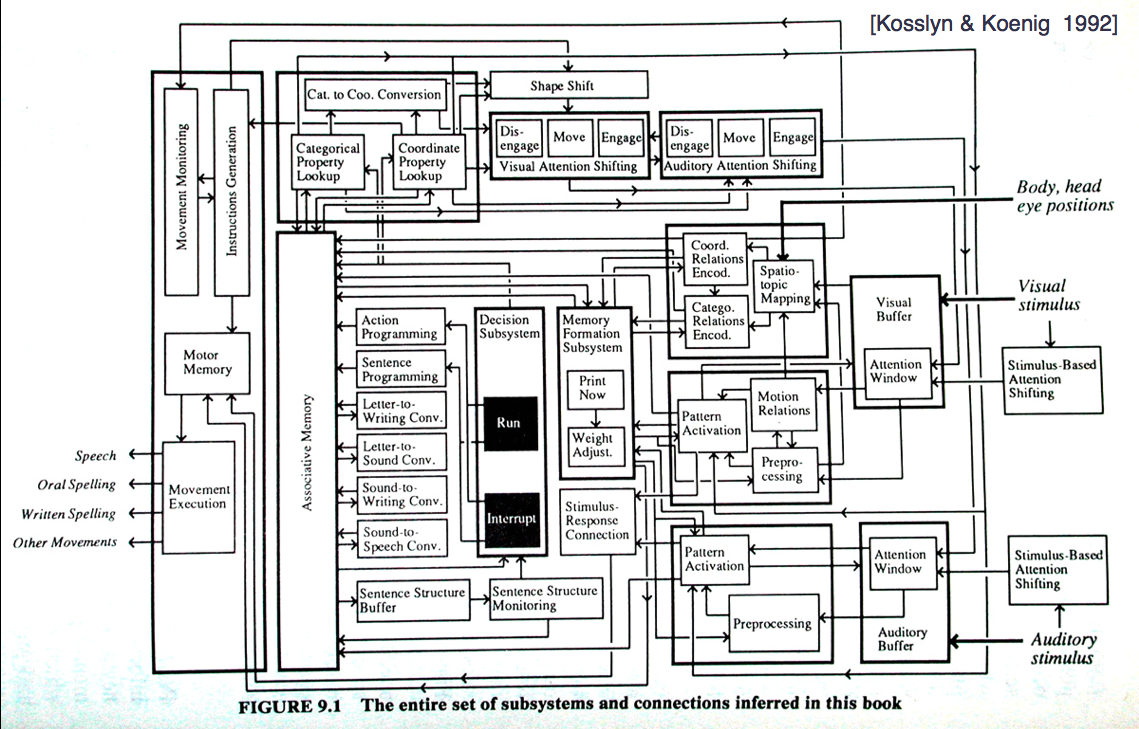
The human and animal minds are probably ... a mixture of all of these.
At the gross anatomical level the brain is a functional hierarchy, with
motor control and perceptual inputs in specific places (vision, for
example, is always in the back of your head -- no execptions, while
language is in the left hemisphere in most people).