7.1 |
Robots |
| |
What it is (typically) |
A phyiscal entity that can move about in a purposeful way
|
| |
Autonomy |
Robots are not always autonomous, but the popular notion of
robots is that they are completely autonomous |
| |
Embodiment |
Robots are embodied de facto - typically when we
say "robot" we mean "autonomous machine with a physical embodiment" |
| |
Made from artificial materials |
Made by humans, as opposed to e.g. cyborgs, who are part human,
part machine. |
| |
The concept of "robot" |
Typcially is used in a very limited way; "cognitive robotics"
is used to indicate "robots with more than just the ability to move".
|
| |
The word "robot" |
Comes from Karel
Capek's play Rossum's
Universal Robots; "robot" means "worker" Czech |
| |
|
|
| 7.3 |
What are Robots Made of? |
| |
Arms |
- Complexity of arms counted in degrees of freedom (1-dimensional motion
ability) - DoFs
- Unusual to see robots with arms of larger than 6 DoFs, because search
space becomes too large
- Inverse kinematics: mathematics for computing joint angles based on
a desired future location of manipulator
|
| |
Manipulators |
- Hands, welders, screwdrivers, etc. [video]
|
| |
Legs |
- Boston Dynamics, U.S. - significant advances in mobility via legs
[video]
- Japanese and Korean projects, incl. Honda, Sony, many universities
|
| |
Power |
- Hydraulic: Only for the largest, strongest (e.g. autonomous backhoe)
- Pneumatics: requires pressurized air, containers heavy
- Batteries: Major constraint on mobility and endurance
|
| |
Control |
- Computers small and efficient enough to do plenty of on-board processing
- Use Wi-Fi for localized robots with more brainpower
|
| |
Sensors |
- Simplest: Sonars, Infrared sensors
- Medium complexity: Laser range finders
- Very complex: Cameras, microphones
- Touch sensors of various sorts
- Joint position sensing technologies
|
| |
|
|
7.4 |
Navigation |
| |
Goal of navigation |
Find your way from A to B |
| |
Constraints |
Obstacles prevent you from going in a straight line |
| |
Planning |
Planning algorithms help you navigate around obstacles
(planning will be covered in W7) |
| |
Dead-reconing |
- "Blind" navigation: Using knowledge of starting point, move
according to an internal map
- Problem: drift in sensors and position will accumulate errors in the
position and orientation
|
| |
Landmark-based navigation |
Recognize textures and configurations of objects, walls, etc. |
| |
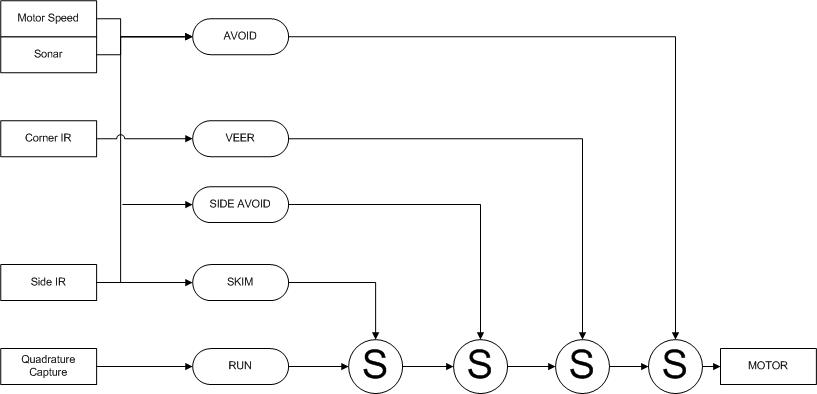
Reactive navigation |
Use external environment to trigger next move(s) |
| |
Map-based navigation |
Use an internal map to determine how to get from A to B |
| |
Bounding-box representation |
- Use bounding boxes around obstacles, to indicate areas safe for travelling
- Idea from computer graphics (level of detail - LoD)
- Helps reduce search space by ignoring details of the shape of things
|
| |
Challenges |
- Unreliable sensors (worse the further away objects are)
- Integrate sensors with a-priori knowledge
- Build up a usable map of terrain that is being navigated
|
| |
|
|
| 7.8 |
Example Robots |
| |
Cog |
- MIT
- Main methodology: Subsumption architecture
|
| |

RODNEY BROOKS WITH COG
|
| |
Attila
/ Genghis |
- MIT
- Main methodology: Competence network; subsumption architecture
|
| |

ATTILA - SIX-LEGGED ROBOT AT MIT
|
| |
|
|
| |
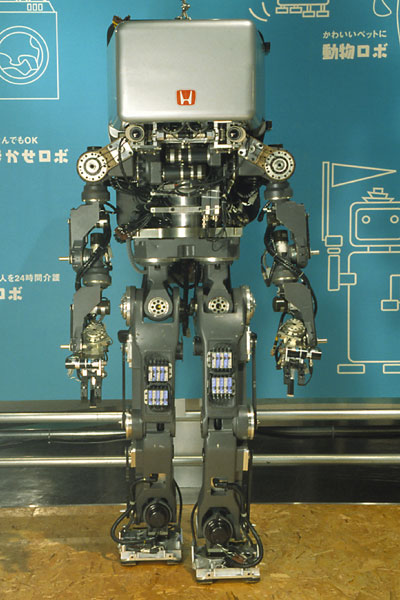
P1 - first Asimo prototype
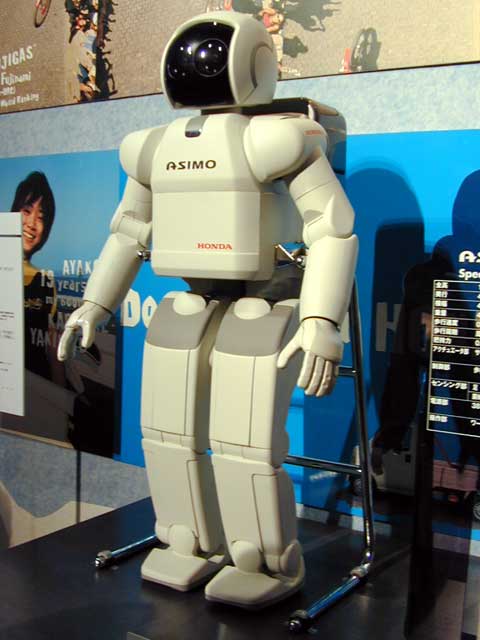
ASIMO - c.a. 2003
|
| |
|
|
| |

TM-SUK female robot 2004
|
| |
|
|
| |

PINO - open robot platform
|
| |
|
|
| |

Robots can also swim
See also [robotuna]
|
| |
|
|
| |

Banryu robot guard "dog"
|
| |
|
|
| |
|
| |
|
|
| |
"Pet" robots are
becoming increasingly popular [ video] |
| |
|
|
| |
Hobby robotics will take off in coming years. Example: Chronio [1]
[2] [3]
[4]
Missing in these robots is a sense of body stance, and they typically
have little or no vision. Therefore, their movements are mostly scripted
(dead-reconing) movements.
|
| |
|
|
| |

Humanoid torso powered by pneumatics
|
| |
|
|
| |
|
| |
|
|